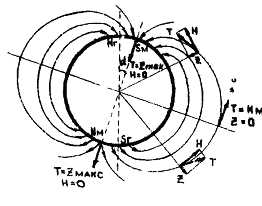
Характеристикой магнитного поля Земли в любой точке пространства является напряженность T. Измеряется она в эрстедах и изображается вектором, направленным по касательной к магнитной силовой линии, проходящей через эту точку. Для анализа магнитного поля Земли вектор Т раскладывают на две составляющие:
- вертикальную составляющую Z, направленную по линии радиуса земного шара ;
- горизонтальную составляющую Н, направленную по линии перпендикулярной земному радиусу.
Вертикальная составляющая Z , как видно из рисунка, максимальна в районах полюсов (660 мэ) и равна нулю в районе экватора. Условно считают, что в северном полушарии Z имеет положительное значение, а в южном - отрицательное.
Горизонтальная составляющая Н максимальна в районе экватора (410 мэ) и равна нулю в районах полюсов.
Линии одинаковых значений составляющих магнитного поля Земли называются изодинами. Они указываются на специальных навигационных картах и в таблицах. При этом весь земной шар делится на так называемые широтные зоны, отдельные для вертикальной и горизонтальной составляющих. В пределах широтной зоны изменение напряженности составляющей магнитного поля Земли составляет 20мэ. Условно считается, что напряженность магнитного поля Земли в пределах одной широтной зоны постоянна и равна среднему значению. Для вертикальной составляющей таких зон 66, для горизонтальной - 21.
Ось магнитного поля Земли не совпадает с географической осью Земли. Угол между ними называют магнитным склонением a. Из-за неравномерностей магнитного поля Земли магнитное склонение в различных районах Земли может быть восточным или западным. Магнитный курс (МК) корабля отличается от географического курсе (ГК) нa величину магнитного склонения :
МК = ГК + a зап. или МК = ГК – a вост.
Корпус подводной лодки, технические средства, вооружение, построенные из ферромагнитных материалов, находясь в магнитном поле Земли, намагничиваются. Намагниченную подводную лодку можно представить как бы из трех магнитов, расположенных в трех взаимоперпендикулярных плоскостях:
1) вертикальной - вертикальное намагничение;
2) продольной - продольное намагничение;
3) поперечной - поперечное намагничение.
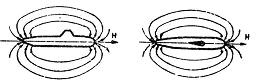
Вертикальное намагничение является результатом действия вертикальной составляющей магнитного поля Земли Z, которая «пронизывает» корабль снизу вверх в южном полушарии и сверху вниз в северном полушарии. Картина магнитного поля подводной лодки от вертикального намагничения представлена на рис
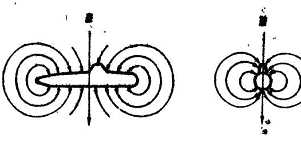
Продольное намагничение является результатом действия горизонтальной составляющей магнитного поля Земли Н вдоль корабля. Горизонтальная составляющая "пронизывает" корабль с кормы в нос на курсе "Север" и с носа в корму на курсе "Юг". Картина магнитного поля подводной лодки от продольного намагничения представлена на рис
Поперечное намагничение является результатом действия горизонтальной составляющей магнитного поля Ззмли Н поперек корабля. Горизонтальная составляющая "пронизывает" корабль с правого борта на левый борг на курсе "Восток" и с левого борта на правый борт на курсе "Запад".
Намагничение подводной лодки слагается из:
- постоянного намагничения;
- индуктивного намагничения.
Постоянный намагничением ПЛ называется такое намагничение, которое приобретается кораблем во время его постройки или длительной стоянки в одном месте и сохраняется неизменным длительное время. Корабль становится «постоянным магнитом».
Индуктивным намагничением ПЛ называется такое намагничение, которое приобретается кораблем в каждый данный момент времени в зависимости от величины и направления составляющих магнитного поля Земли. Это намагничение непрерывно изменяется с изменением магнитного поля Земли и исчезает, если магнитное поле Земли в точке нахождения корабля становится равным нулю.
Постоянное намагничение ПЛ измеряется и уничтожается на специальных стендах СБР, а составляющие индуктивного намагничения компенсируются с помощью стационарного корабельного размагничивающего устройства.
2. Назначение, состав и принцип действия размагничивающего устройства ПЛ.
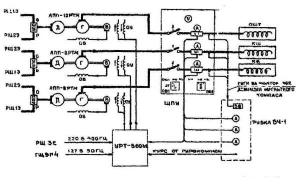
На подводной лодке для защиты ее от неконтактного и индукционного минно-торпедного оружия, основанного на использовании магнитного поля, а также защиты от средств магнитометрического обнаружения установлено размагничивающее устройство РУ-С/45 М. Оно состоит из:
1) размагничивающих обмоток: ОШТ, КШ, КБ;
2) преобразователей типа АПП питания обмоток;
3) щита питания и управления обмоток ЩПУ;
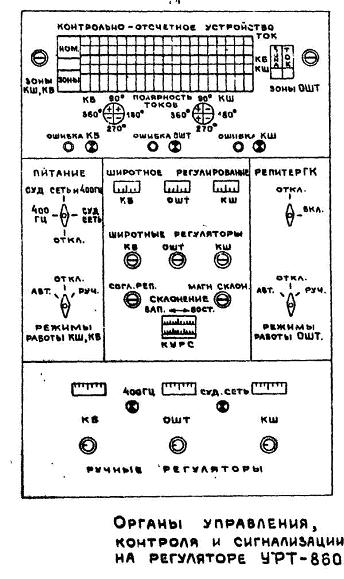
4) универсального регулятора тока в обмотках УРТ-860М.
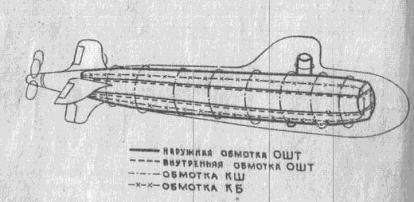
Основная широтно-температурная обмотка (ОШТ) предназначена для компенсации вертикальной намагниченности ПЛ. Витки этой обмотки охватывают ПЛ в горизонтальной плоскости снаружи и внутри прочного корпуса. Питается обмотка от преобразователя АПП-12РТМ. Курсовая шпангоутная обмотка (КШ) предназначена для компенсации продольного намагничения ПЛ. Ее витки расположены в шпангоутных плоскостях снаружи прочного корпуса. Питается обмотка от преобразователя АПП-8РТ. Курсовая батоксовая обмотка (КБ) предназначена для компенсации поперечного намагничения ПЛ. Ее витки расположены в батоксовых плоскостях по правому и левому борту снаружи прочного корпуса, питается обмотка от преобразователя АПП-8РТ. Трассы обмоток показаны на рисунке.
Принцип размагничивания ПЛ состоит в следующем. По обмоткам РУ пропускается постоянный ток такого направления и такой величины, чтобы создаваемый им магнитный ток был равен и противоположно направлен соответствующей составляющей индуктивной намагниченности ПЛ (вертикальной, продольной, поперечной).
Так как вертикальная составляющая Z магнитного поля Земли, создающая вертикальную намагниченность ПЛ, в пределах одной широтной зоны постоянна, то при плавании ПЛ в пределах этой зоны ток в обмотке ОШТ поддерживается постоянным. При переходе ПЛ в другую широтную зону в обмотке 0ШT устанавливается новое значение тока. Значение его не зависит от курса ПЛ.
Оно имеет место при плавании ПЛ в районах магнитных полюсов. При плавании ПЛ в северных широтах направление тока в обмотке ОШТ должно быть, при плавании в южных широтах - отрицательным.
Продольная и поперечная намагниченность ПЛ зависят не только от величины горизонтальной составляющей H магнитного поля Земли, которая в пределах одной широтной зоны постоянна, но и от того, под каким углом эта составляющая "пронизывает" корабль.
При этом ток в обмотке КШ на курсах 0°- 90° и 270° - 360° должен быть положительным, а на курсах 90° - 270° - отрицательным. Ток в обмотке КБ должен быть положительным на курсах 0° - 180°, а отрицательным на курсах 180° - 360°.
При переходе ПЛ в другую широтную зону В обмотках КШ и КБ устанавливаются новые значения токов. Установка новых значений токов в обмотках РУ при переходах ПЛ в другие широтные зоны называется широтным регулированием. Регулирование токов в обмотках РУ производится е помощью универсального регулятора тока УРТ-860М, который обеспечивает:
1. Автоматическую стабилизацию тока в обмотке ОШТ.
2. Автоматическое изменение токов в обмотках КШ и КБ в зависимости от курса ПЛ по указанным выше законам.
3. Ручное широтное регулирование токов в обмотках ОШТ, КБ и КГ.
4. Резервное ручное управление токами в обмотках ОШТ, КШ и КБ в случае выхода из строя автоматического управления.
Для обеспечения автоматического регулирования токов в обмотках КШ и КБ в зависимости от курса ПЛ в УРТ-860M вводится географический (истинный) курс от гирокомпаса о помощью сельсинной передачи. В случае выхода из строя синхронной связи с гирокомпасом в регуляторе предусмотрена ручная установка требуемого истинного курса ПЛ.
Так как в УРТ-860М вводится истинный курс, а автоматическое регулирование токов в курсовых обмотках происходит в зависимости от магнитного курса, то в регуляторе предусмотрено ручное введение поправки на магнитное склонение.
Принцип регулирования токов в обмотках РУ состоит в следующем. Величина и направление тока в обмотке РУ определяется величиной и полярностью напряжения генератора соответствующего преобразователя, которое, в свою очередь, зависит от величины и направления тока в обмотке возбуждения ОВ генератора. Последняя является нагрузкой возбудителя, обмотки управления (ОУ) которого включены на выход регулятора УРТ-860М. При изменении тока в обмотках управления происходит изменение напряжения на выходе возбудителя и, как следствие, изменение тока в обмотке возбуждения генератора. В результате происходит изменение напряжения на зажимах генератора, что вызывает изменение тока в обмотке РУ. Сигнал, пропорциональный фактическому значению тока в обмотке, снимается с шунта Ш и подается в регулятор, где сравнивается с заданным.
Фактические значения токов в обмотках РУ контролируются по амперметрам, установленным в щите ЩПУ и в штурманской рубке. Для компенсации девиации (погрешности) магнитного компаса, возникающей под влиянием магнитных полей, создаваемых обмотками РУ, в станцию питания магнитного компаса подаются сигналы, пропорциональные фактическим значениям токов в обмотках РУ.